
It is enjoyable for me to explore variabties of electronic components and combine them into functional blocks and toys.

Android Game Warship-R was running on emulator while controlled by python via ADB interface. Screenshots were collected and used to train a neural network based classifier in Matlab. Then the weight matrixes were then transfered to python. Python scripts collected screenshots, made classification and decided which button to press.
This STM32F103 board recieves control signal via SPI port, and control the 4 step motors. Limit switchs were also connected to this board. This board works as part of the music box project.

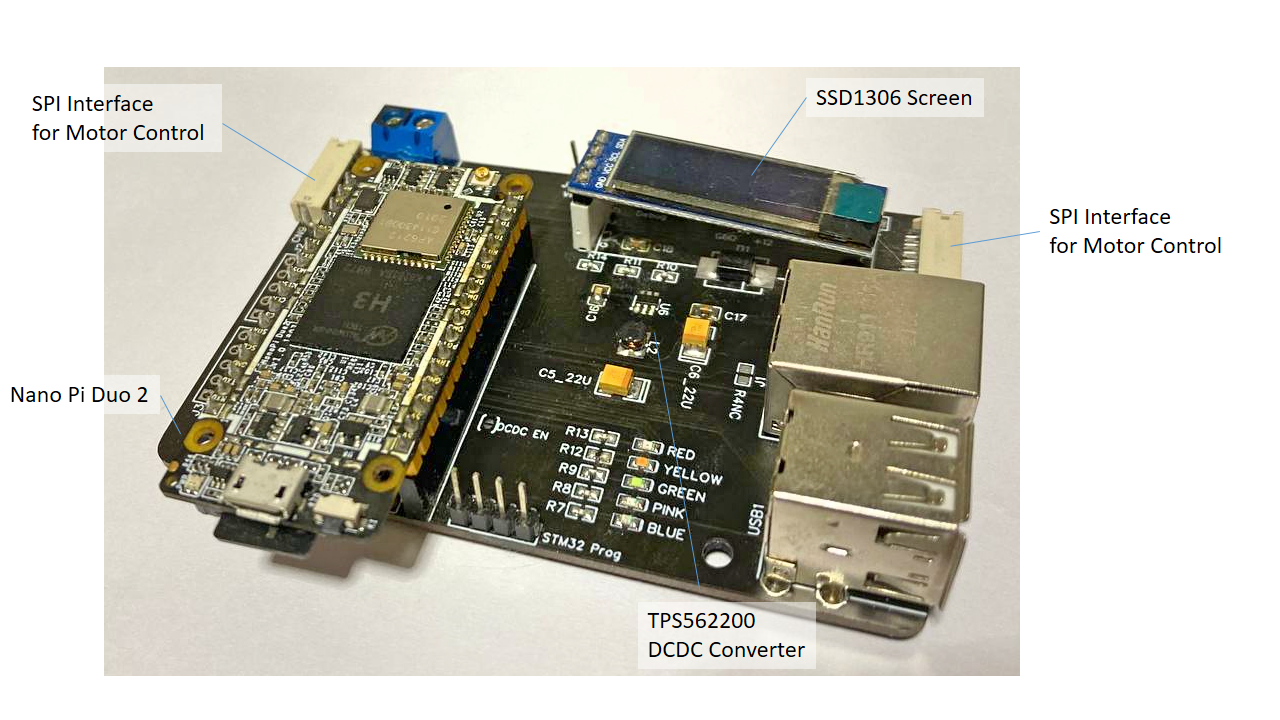
Nanopi Duo 2 running embedded Ubuntu was utilized to control the motor driver boards described in the previous section. The SPI/ I2C/ USB host and ethernet ports was fanned out. TPS562200 switch converter was used to power this board from 12V supply.
Python scripts on this embedded platform was developed to control 30 motors via 8 motor driver boards.
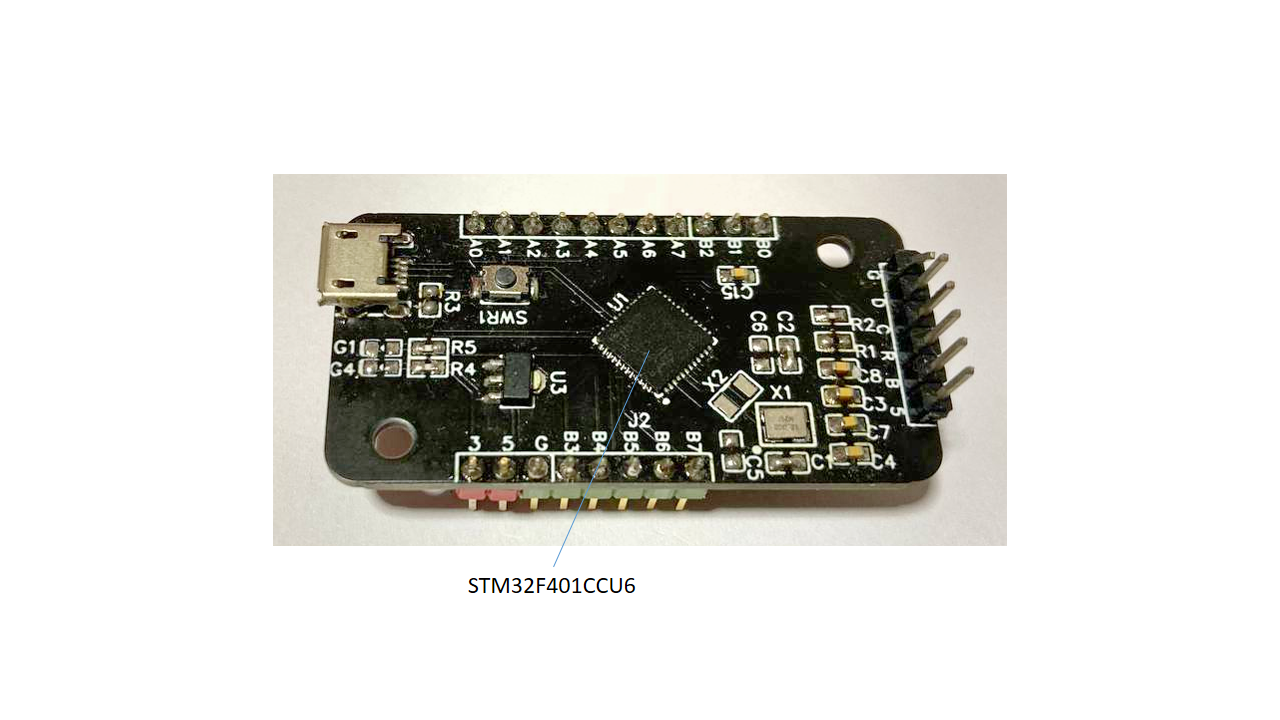
STM32F401CCU6 was very cheap when compared with other STM32 QFP MCUs during this pandamic chip shotage period. So I designed a board to test how difficult for me to ahnd sholder an QFN48. It works great.
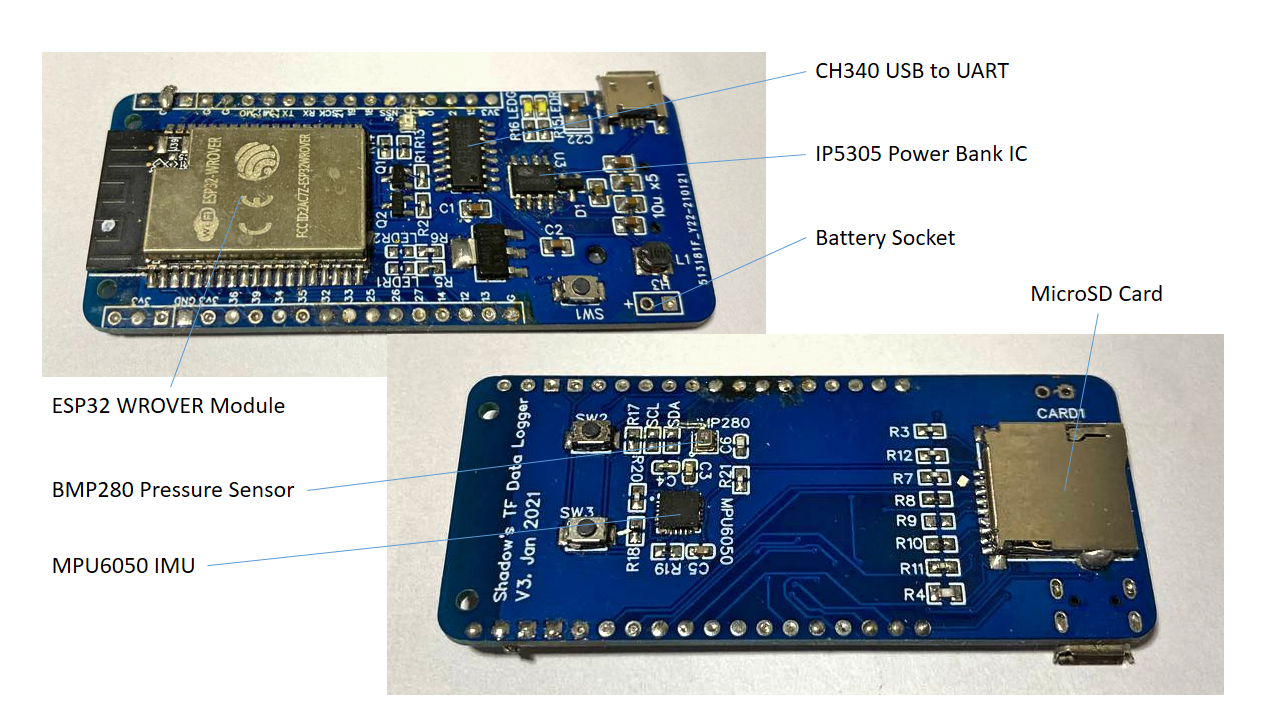
ESP32 is a very friendly MCU for embedded developper with both Wifi and BLE connnectiivity. Moreover, micropython can run on this platform, making it ideal for rapid prototyping for sensors and motor drivers.
This board was designed to collect data from on board accelerometers and barometers, as well as external sensors. Data can be stored in the SD card. One power bank SoC was used to simplify the design while able to supply 5V output to external ICs or motors.
It was always my drwam to build my own drone. This is the first step towards the goal. STSPIN230 is a compact BLDC motor driver for low voltage applications. It was wired to a STM32F030F4P6 for timing control. This design is lack of Back EMF detection, which will be covered in next updated version.
